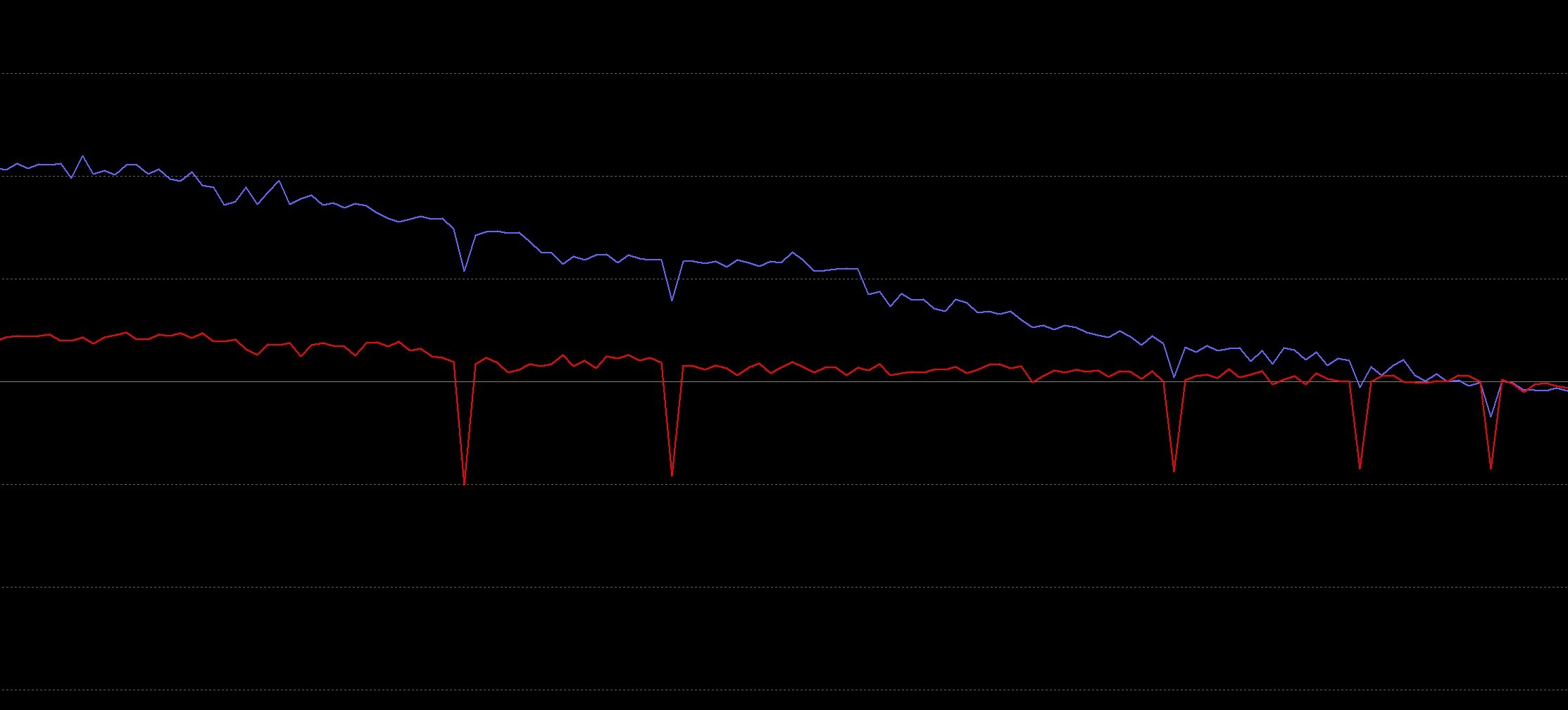
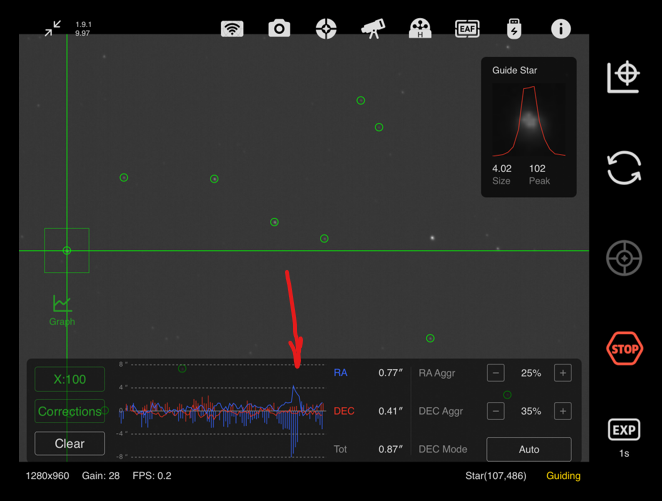
RLamb Unfortunately that didn't seem to have any meaningful effect when guiding east of the meridian as my RA is still randomly jumping to around the 4-5.0 RMS for several minutes at a time before settling down.
I concur with you that a big difference in East and West pier side points to some problem with the mechanics of the mount.
Have you tried roughly balancing the mount (RA axis) with a counterweight to see if the discrepancy is still there? It is hard to balance a strain wave gear mount. One way I have found to do it is to look at the current draw of the RST-135 while the mount is tracking. When the mount is more balanced, it draws less current (the mount has less work to do). Do not balance it completely, since that will un-mesh the gears. With my RST-135, I have found perfect balancing to be detrimental to guiding.
For that matter, you might check (can do this even in the daytime even without dark skies) the current draw of your mount while tracking pier East and tracking pier West. With the OTA on the west of the pier (target on east of Meridian) the RA motor will be trying to actually brake when it is tracking. When the target is on the West of the Meridian, the motor has to work against gravity to pull the OTA mass up.
If there is more strain (and thus more current draw) on the motors, you can try using a larger power supply and heavy gauge and short power cables (at least 18 AWG -- and not the fake Amazon "18 AWG wires") between the supply and the mount. Under no circumstance power the mount through the ASIAIR's power outputs (I do not use any of the ASIAIR's power outlets).
The most strain [sic] on the motors happens when the target is within 30º of the Meridian. So, if you see different behaviors with tracking near the Meridian vs tracking within 30º of the horizon, that is another sign there is insufficient torque in the RA axis (or there is some additional unwanted friction that the motor has to overcome). (My impression is that ZWO had used stepper motors in their mount. My RST-135 uses real servo motors. But I could be wrong, since I have not actually see it published.)
At this point, there is not much you can do even if it is the mount's fault, except to return the mount to the dealer, so you might as well see if there is something you can do to mitigate the problem. At least you can try to reduce the strain (semi-balancing the mount) and making sure the motors have enough capability (heavy power cables and large power supply).
Finally (I do this often when I am testing autoguiding algorithms), see if you can very lightly load the mount by mounting only the guide scope on the mount, and not include the OTA. In my case, I use a dual saddle plate with my mount, and it is easy to simply not mount the OTA. If you have only a single declination saddle, you may need to fashion something to mount just only the guide scope on the saddle.
Chen