Jake It seems turning off DEC correction is better.
OK, we are getting somewhere.
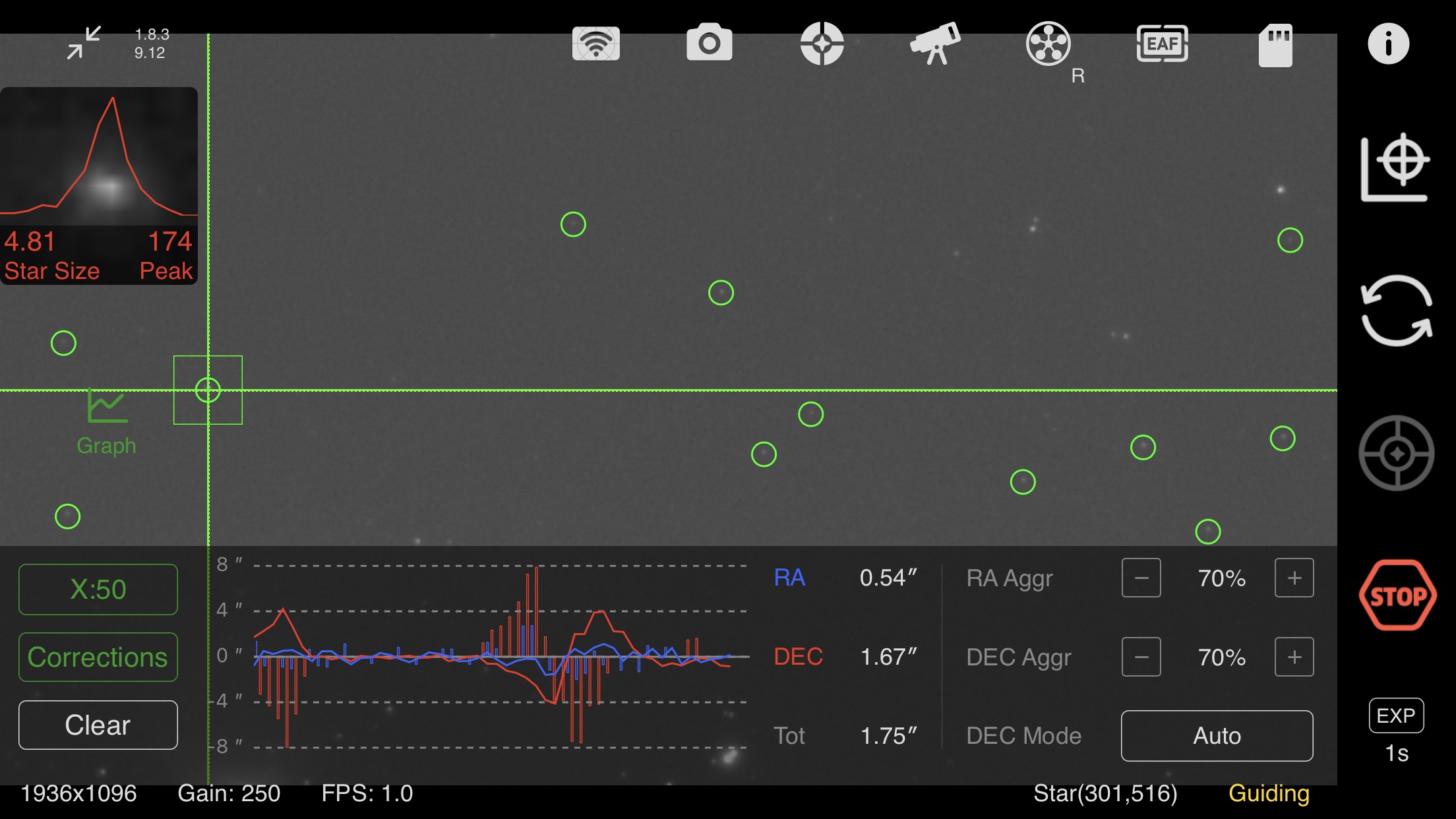
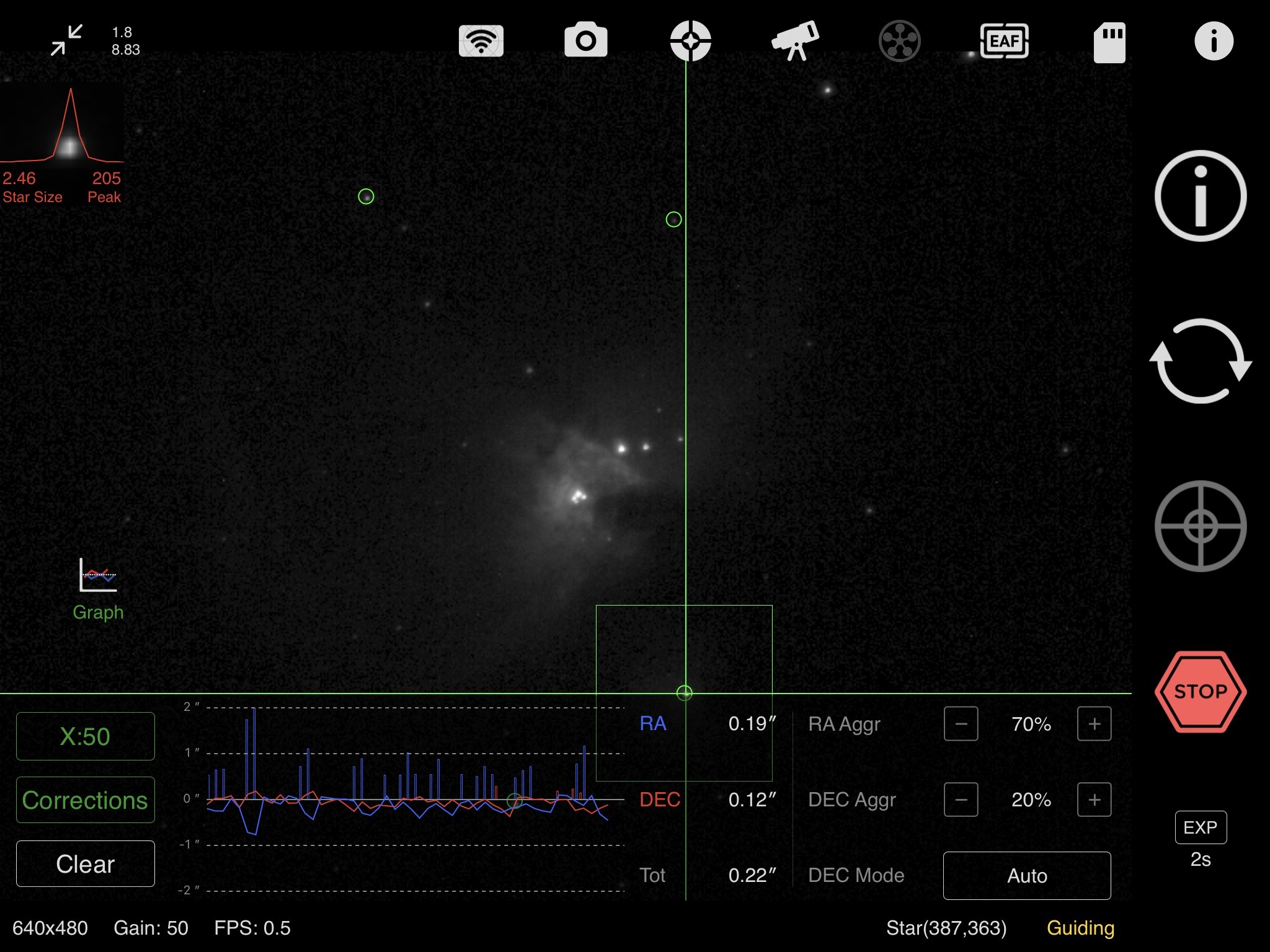
Your declination gain ("aggressiveness") is way too high, and caused that overcorrection pulse that we saw; i.e., one cycle of an oscillation.
Start at 15%. Increase the gain only when you cannot keep up with correcting slow errors such as mount balancing, polar alignment, etc.
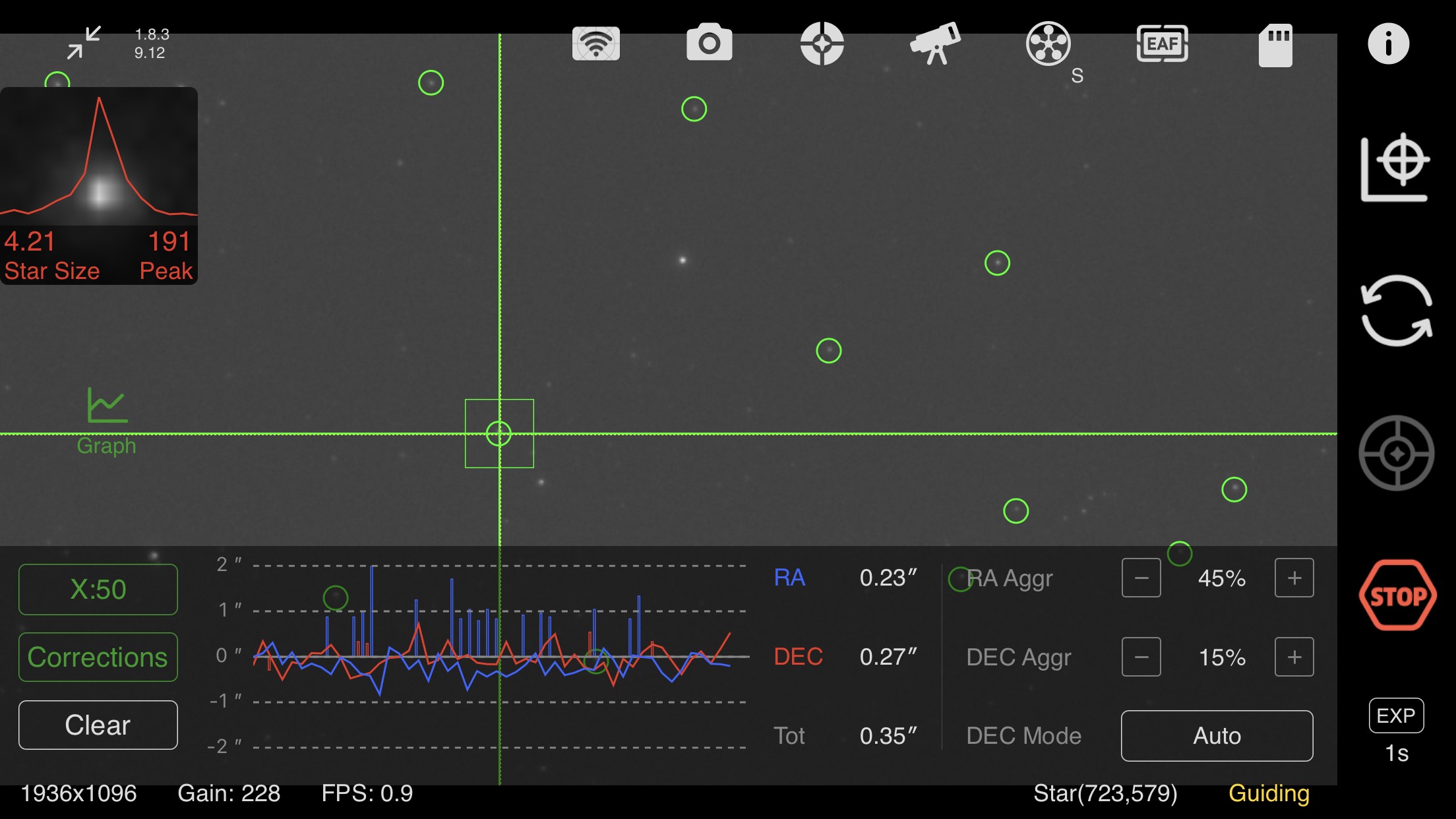
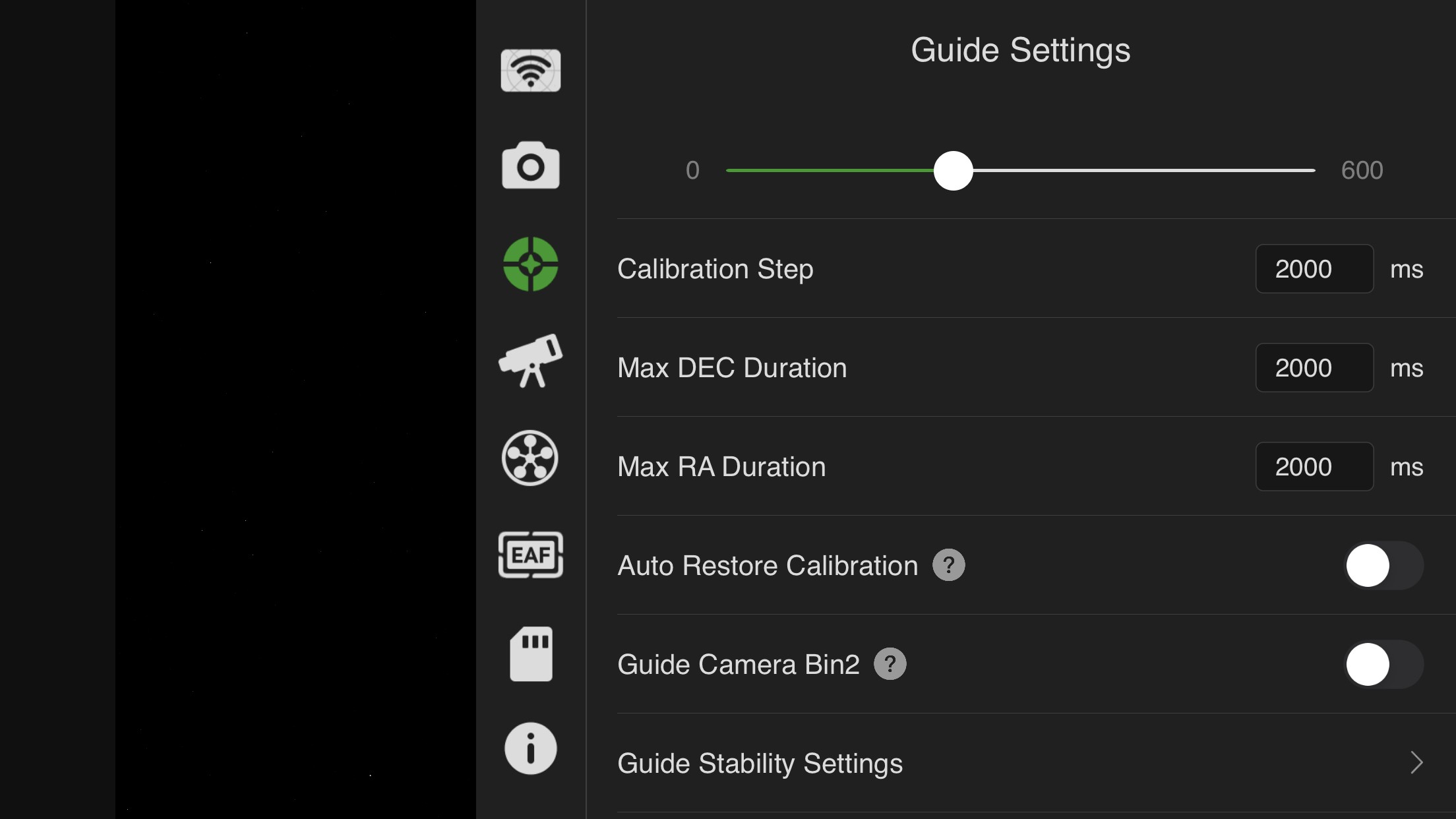
By practically setting the declination gain to zero (1ms), there is essentially no declination correction. Eventually, the declination will slowly increase (caused by field rotation from non-perfect polar alignment). Just increase the declination gain just sufficient to overcome that error (or any balance error). I.e., increase declination gain only if you see a slowing creeping ramp that can't be corrected back to 0.
RA corrections are different from declination corrections. There, you are correcting for periodic error of the gears, since the RA motor is constantly running at sidereal rate. (Declination motor should not move at all if your polar alignment is perfect.) So, there, you need to adjust the gain to just overcome the peak periodic error. You probably should start that at 15% too, and only increase it if the feedback does not keep up with the peak periodic error.
Anyway, your guiding problem should be over.
Chen